服務(wù)熱線
86-0769-83110798

針對傳統(tǒng)無人機抗風(fēng)試驗裝置多模擬穩(wěn)態(tài)風(fēng)、難以復(fù)現(xiàn)真實飛行中陣風(fēng)擾動的問題,本文提出一種多自由度陣風(fēng)模擬抗風(fēng)試驗裝置的設(shè)計方案。通過拆解裝置核心結(jié)構(gòu)、優(yōu)化關(guān)鍵技術(shù)參數(shù),實現(xiàn)對動態(tài)陣風(fēng)的精準模擬,同時完成無人機姿態(tài)響應(yīng)與受力數(shù)據(jù)的同步采集,為無人機抗風(fēng)性能優(yōu)化提供可靠的試驗支撐。由Delta德爾塔儀器聯(lián)合電子科技大學(xué)(深圳)高等研究院——深思實驗室團隊、工信部電子五所賽寶低空通航實驗室研發(fā)制造的無人機抗風(fēng)試驗風(fēng)墻\可移動風(fēng)場模擬裝置\風(fēng)墻裝置,正成為解決無人機行業(yè)抗風(fēng)性能測試難題的突破性技術(shù)。

無人機風(fēng)墻測試系統(tǒng)\無人機抗風(fēng)試驗風(fēng)墻\可移動風(fēng)場模擬裝置\風(fēng)墻裝置
一、裝置設(shè)計背景與核心需求
傳統(tǒng)無人機抗風(fēng)試驗以風(fēng)洞穩(wěn)態(tài)風(fēng)模擬為主,僅能測試無人機在恒定風(fēng)速下的穩(wěn)定性,無法復(fù)現(xiàn)實際飛行中 “陣風(fēng)突變、風(fēng)向驟變" 的復(fù)雜場景。例如電力巡檢無人機在穿越高壓線路廊道時,常遭遇 5-8m/s 的突發(fā)側(cè)風(fēng),傳統(tǒng)裝置難以模擬此類動態(tài)風(fēng)況,導(dǎo)致試驗數(shù)據(jù)與實際性能偏差較大。
基于此,裝置設(shè)計需滿足三大核心需求:一是風(fēng)場模擬范圍覆蓋 2-25m/s(對應(yīng) 0-10 級風(fēng)),且陣風(fēng)風(fēng)速變化率可調(diào)節(jié)(0.5-5m/s2);二是能約束無人機姿態(tài),同時采集六向力(拉力、升力、阻力等)與姿態(tài)角(滾轉(zhuǎn)、俯仰、偏航)數(shù)據(jù);三是裝置結(jié)構(gòu)緊湊,支持戶外臨時部署,適配中小型無人機(最大起飛重量 30kg 以內(nèi))。
二、裝置核心結(jié)構(gòu)與技術(shù)實現(xiàn)
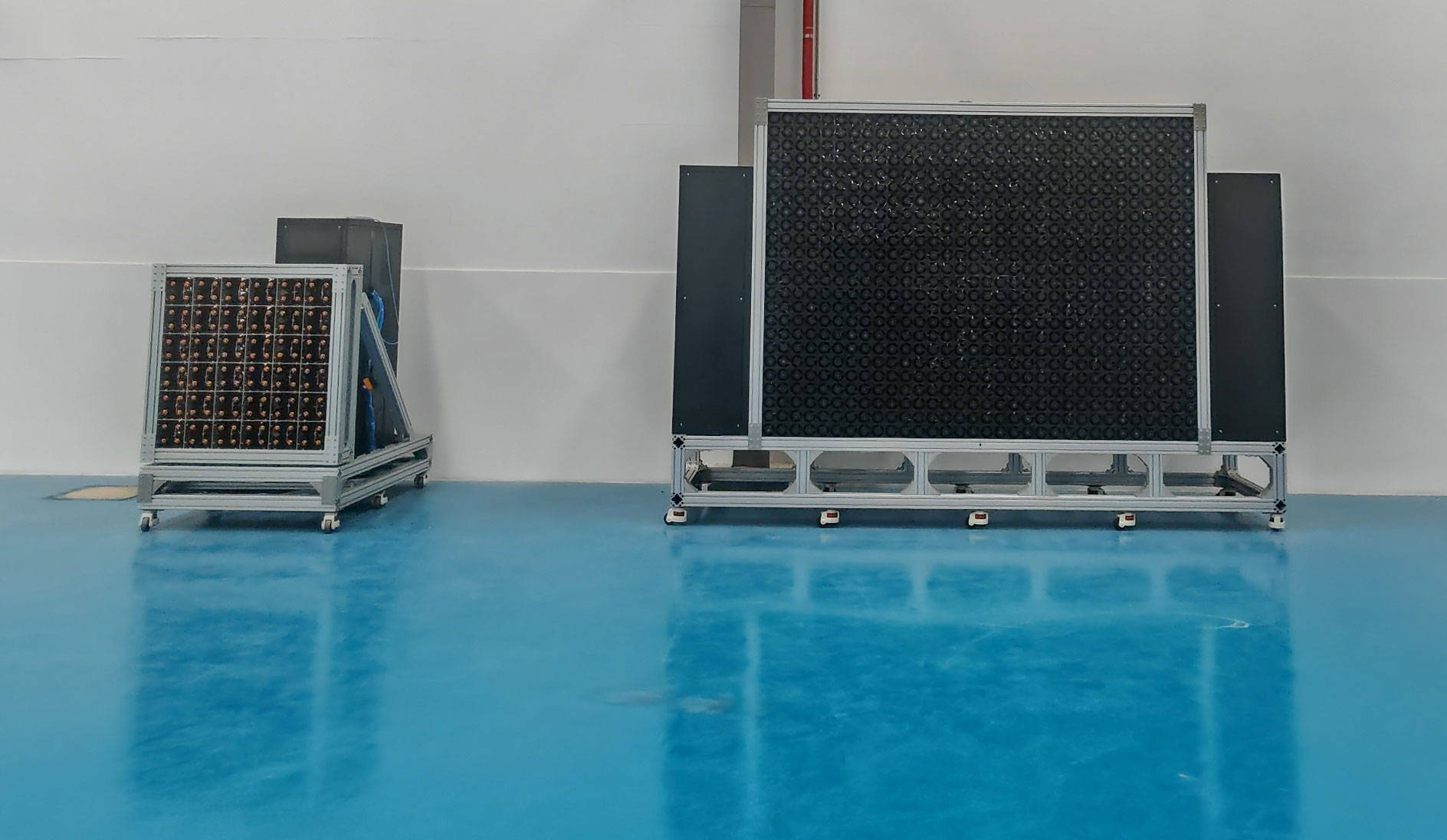
裝置采用 “風(fēng)場發(fā)生系統(tǒng) - 姿態(tài)約束系統(tǒng) - 數(shù)據(jù)采集系統(tǒng)" 三位一體架構(gòu),各模塊技術(shù)細節(jié)如下:
風(fēng)場發(fā)生系統(tǒng):采用 “軸流風(fēng)機 + 可變導(dǎo)流板" 組合設(shè)計,風(fēng)機功率 15kW,通過伺服電機控制導(dǎo)流板角度(0-90°),實現(xiàn)陣風(fēng)風(fēng)速的快速切換。系統(tǒng)內(nèi)置風(fēng)速反饋傳感器,采樣頻率 100Hz,可將風(fēng)速控制精度穩(wěn)定在 ±0.2m/s,滿足動態(tài)陣風(fēng)模擬需求。
姿態(tài)約束系統(tǒng):基于六軸力傳感器(量程 0-500N,精度 0.1N)設(shè)計柔性約束支架,既能固定無人機位置,又不限制其姿態(tài)微調(diào)(滾轉(zhuǎn) ±30°、俯仰 ±20°、偏航 ±15°)。支架材質(zhì)選用航空鋁合金,重量僅 8kg,減少對無人機氣動特性的干擾。
數(shù)據(jù)采集系統(tǒng):集成無人機飛控數(shù)據(jù)接口(支持 DJI SDK、PX4 協(xié)議)與裝置自帶傳感器,可同步采集風(fēng)速、風(fēng)向、無人機姿態(tài)角、六向力等 12 項參數(shù),數(shù)據(jù)采樣頻率 200Hz,通過 5G 模塊實時傳輸至云端存儲,便于后續(xù)數(shù)據(jù)分析。
三、裝置性能驗證與試驗案例
以某款 6kg 級電力巡檢無人機為測試對象,開展兩項核心驗證:
陣風(fēng)模擬精度測試:設(shè)定 “5m/s 穩(wěn)態(tài)風(fēng)→12m/s 陣風(fēng)(持續(xù) 2s)→5m/s 穩(wěn)態(tài)風(fēng)" 的風(fēng)況,裝置實際輸出風(fēng)速與設(shè)定值的誤差≤3%,陣風(fēng)切換響應(yīng)時間≤0.3s,滿足動態(tài)風(fēng)況模擬要求。
姿態(tài)數(shù)據(jù)一致性測試:對比裝置采集的無人機姿態(tài)角與飛控自帶數(shù)據(jù),滾轉(zhuǎn)、俯仰、偏航角的誤差分別為 ±0.5°、±0.3°、±0.8°,數(shù)據(jù)一致性良好,可用于后續(xù)抗風(fēng)性能評估。
結(jié)語
多自由度陣風(fēng)模擬裝置通過動態(tài)風(fēng)場發(fā)生、柔性姿態(tài)約束與高精度數(shù)據(jù)采集的協(xié)同設(shè)計,解決了傳統(tǒng)裝置 “重穩(wěn)態(tài)、輕動態(tài)" 的技術(shù)短板。后續(xù)可進一步優(yōu)化導(dǎo)流板控制算法,提升超 15m/s 強陣風(fēng)的模擬穩(wěn)定性,為大型工業(yè)級無人機的抗風(fēng)試驗提供更全面的技術(shù)支撐。
聯(lián)系方式
郵件:gaoshengkeji@163.com